匈牙利算法 匈牙利算法步骤
任给初始匹配M
若M饱和V1则结束,否则转(3)
在V1中找一个非M饱和点x,置S={x},T={ }
若N(S)=T,则停止,否则在N(S)-T中任选一点y
若y为M饱和点转(6),否则求一条从x到y的M可增广路P,并更新匹配M,转(2)
因为y是M饱和点,所以M中有一边(y,u),置S=S∪{u},T=T∪{y},转(4)
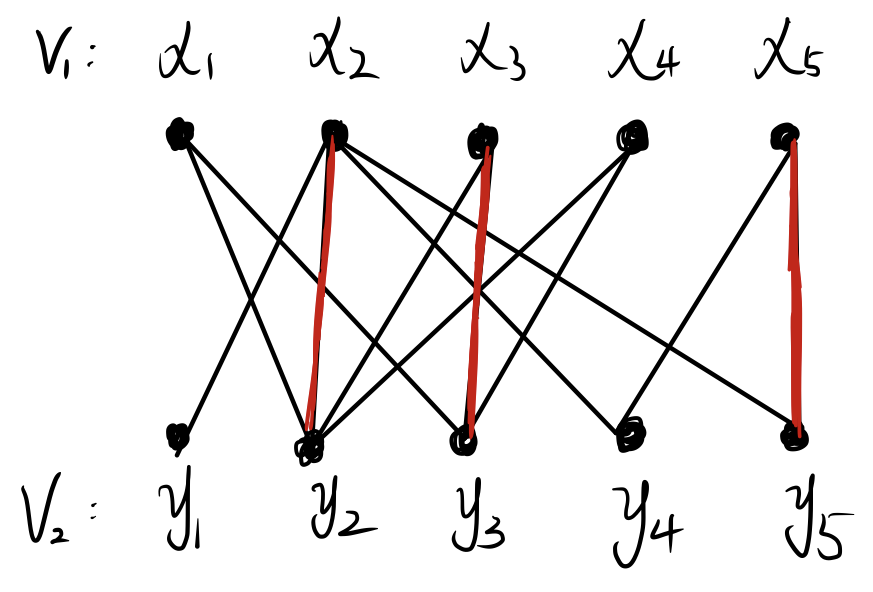
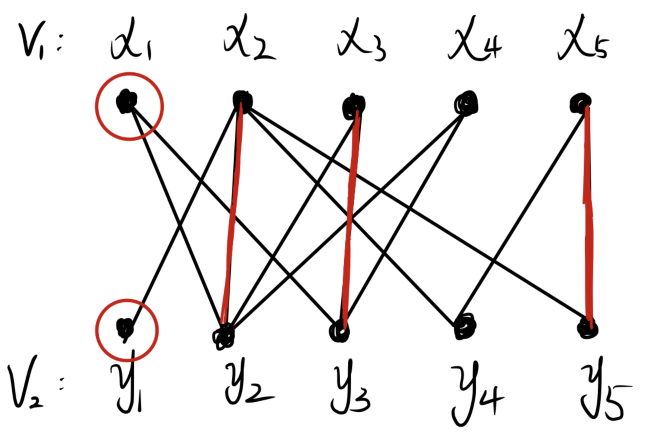
代码部分 输入二部图如下:
可以由以下代码表示:
1 2 3 4 5 6 bi_graph = [[0 , 1 , 1 , 0 , 0 ], [1 , 1 , 0 , 1 , 1 ], [0 , 1 , 1 , 0 , 0 ], [0 , 1 , 1 , 0 , 0 ], [0 , 0 , 0 , 1 , 1 ]]
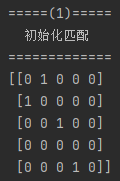
(1). 任给初始匹配M
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 def init_matching (graph ): x, y = np.shape(graph) matching = np.zeros((x, y), int ) matched = [] for i in range (0 , x): for j in range (0 , y): if graph[i][j] == 1 and j not in matched: matching[i][j] = 1 matched.append(j) break return matching
创建一个与二部图矩阵对应的匹配矩阵,初始化匹配矩阵的规则是:遍历输入的二部图矩阵,从V1出发找到V2找边,如果该边在V2中饱和的点已经在匹配中出现,则不选择该边,当找到一条合适的边时,将其加入匹配矩阵结束本次循环,并在V1中找到下一个点继续重复以上过程。
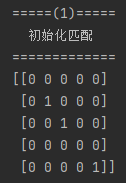
以上过程结束后即可获得如下(a)所示初始匹配矩阵。由于此初始化方法在本例中直接给出了最大匹配,无法体现完整的算法过程,因此在之后的代码中将采用(b)作为初始匹配。
(b)初始化匹配结果如图所示:
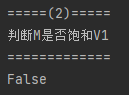
(2). 判断匹配M是否饱和V1
1 2 3 4 5 6 7 8 def judge_saturated (matching ): saturate = np.sum (matching, axis=1 ) for i in saturate: if i == 0 : return False return True
将匹配矩阵按维度求和,只要有一行的和等于0则M未饱和V1。如果饱和则当前匹配为最大匹配,直接输出结果,否则转到(3)。
1 2 3 4 5 6 if judge_saturated(matching): print ("=====(结束)=====" ) print ("最大匹配:" ) print (matching) return matching
该案例的饱和结果如下:
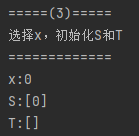
(3). 在V1中找一个非M饱和点x,置S={x},T={ }
1 2 3 4 5 6 7 8 9 10 11 def init_s_and_t (matching ): s = [] t = [] saturate = np.sum (matching, axis=1 ) for i in range (0 , len (saturate)): if saturate[i] == 0 : s.append(i) break return s, t
将匹配矩阵按维度求和,值为0的行对应的V1中的点即为非M饱和点,取该点为x,初始化S={x},T={ }。
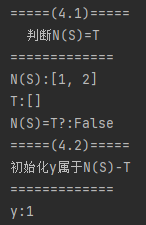
(4). 如果N(S)=T,则停止。否则选择y属于N(S)-T
(4.1). 获得N(S) 判断N(S)与T是否相等
1 2 3 4 5 6 7 8 9 10 11 12 def get_neighbor (graph, s ): x, y = np.shape(graph) neighbor = [] for i in s: for j in range (0 , y): if graph[i][j] != 0 and j not in neighbor: neighbor.append(j) neighbor.sort() return neighbor
在二部图矩阵中,从每行出发找非零值对应的V2中的点即为该点相邻的点,找出S中的点对应的所有点即可获得N(S)的值。
1 2 3 4 5 if np.all (neighbor == t): print ("=====(结束)=====" ) print ("最大匹配:" ) print (matching) return matching
如果相等则当前匹配为最大匹配,直接输出结果。
(4.2). 初始化y
否则初始化y∈N(S)-T
1 2 n_minus_t = [i for i in neighbor if i not in t] y = n_minus_t[0 ]
在本案例中:
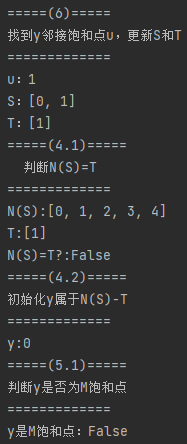
(5.1). 判断y是否为M饱和点
1 2 3 4 5 6 7 def if_be_saturated (y, matching ): saturate_y = np.sum (matching, axis=1 ) if saturate_y[y] == 1 : return True return False
如果不是饱和点则求一条从x到y的M可增广路P,并更新匹配M,转(2);如果是饱和点则转到(6)。
在本案例中:
(6). 因为y是M饱和点,所以M中有一边(y,u),找到u,置S=S∪{u},T=T∪{y},转(4)。
在本案例中,之后的过程为:
(5.2) 求一条从x到y的M可增广路P,并更新匹配M, 转(2)
经过以上过程找到非饱和点y,此时x与y如图所示,需要找到一条从x到y的可增广路。
1 2 3 4 5 6 7 def find_augmentative_path (graph, matching, x, y ): path = v1_to_v2(graph, matching, x, [], y) path = path[:-1 ] return path
经过前面的算法处理,现阶段一定可以找到一个从x到y的可增广路。该路开始于x点,终止与y点。该路径中V1和V2部分的点交替出现,从V1到V2的边不在匹配M中,可以有多条,从V2到V1的边在匹配M中,只能有一条。可能找到多条可增广路,不影响最后结果的正确性。交错路以走到y点标志结束。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 def v1_to_v2 (graph, matching, x, path, goal ): a_path = [] gx, gy = np.shape(graph) for ggy in range (0 , gy): if graph[x][ggy] == 1 : if if_y_in_path(ggy, path): continue if ggy == goal: a_path = path.copy() a_path.append([x, ggy]) a_path.append([gx, gy]) break new_path = path.copy() new_path.append([x, ggy]) v2v1 = v2_to_v1(graph, matching, ggy, new_path, goal) if len (v2v1) > 0 : a_path = v2v1 len_of = len (v2v1) - 1 if v2v1[len_of][0 ] == gx: return a_path return a_path
从V1到V2找一条非M边的代码如上所示,graph为二部图矩阵,matching为匹配矩阵,x为本次的出发点,path保存已经走过的交错路,goal记录最终结束的点。
从graph矩阵中找出从x出发所有可以走到的V2中的点,进行判断。
如果该点已经在交错路path中出现过了,则跳过该点,因为可增广路中无重复的边,而从V2中出发的边只能走M中的边,每个点最多只有一条,因此V2中的点在本算法path中只能出现一次。
1 2 3 4 5 6 7 def if_y_in_path (y, path ): for p in path: if path[1 ] == y: return True return False
如果该点走到了y点(即与goal的值相同),说明找到了一条可增广路,将该点加入到path中,并在path的最后加上标记(a_path.append([gx, gy]))以结束该算法。
如果以上条件均不满足,则将该点加入path中,并将二部图(graph)、匹配矩阵(matching)、该V2中的点(y)、目前找到的交错路(path)、结束目标(goal)作为参数,传入v2_to_v1()方法中,以继续找到一条从V2到V1的匹配边。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 def v2_to_v1 (graph, matching, y, path, goal ): a_path = [] mx, my = np.shape(matching) for mmx in range (0 , mx): if matching[mmx][y] == 1 : new_path = path.copy() new_path.append([mmx, y]) v1v2 = v1_to_v2(graph, matching, mmx, new_path, goal) if len (v1v2) > 0 : a_path = v1v2 len_of = len (v1v2) - 1 if v1v2[len_of][0 ] == mx: return a_path return a_path
v2_to_v1与v1_to_v2方法相似,因为V2到V1找的是匹配边,因此不用考虑结束值和重复值的问题。
两种方法互相调用,v1_to_v2找从V1到V2的非M边,v2_to_v1找从V2到V1的M边。在两个方法的调用过程中如果出现一条死路,该方法将返回一个空表,这种情况下该空表会随着调用关系向外传递,使调用该方法的方法忽略这条路径。最终调用关系将在v1_to_v2找到y之后结束,该方法在找到y之后会在path的最后添加标记并返回,在v1_to_v2和v2_to_v1都对path最后的标记进行了检查,当检查出该标记后直接返回不再进行后续过程。
根据以上思路,在本例中找到的可增广路为:
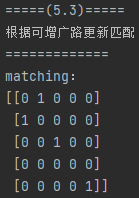
(5.3). 根据可增广路更新匹配,转(2)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 def update_matching (path, matching ): flag = True for p in path: if flag: matching[p[0 ]][p[1 ]] = 1 flag = False continue if not flag: matching[p[0 ]][p[1 ]] = 0 flag = True continue return matching
根据可增广路交替更新匹配中的边。
在本案例中,更新后匹配结果如下图所示:
之后代码转至(2),继续重复上述过程,直到达到结束条件,输入最大匹配。
代码的完整运行结果如下图所示: